Функция поиска начального положения
В режиме позиционирования серводвигатель всегда работает в заданном положении, которое обычно принимается относительно некоторого известного нулевого значения – начального положения. Иногда при включении внешнего контроллера перед выполнением дальнейших действий требуется корректировка этой точки. Нулевое положение используется в качестве начальной точки. Для этой цели предусмотрена функция возврата в начальное положение. Функция поиска начального положения реализована для режимов импульсного и внутреннего задания положения.
Сервопривод обеспечивает возможность настройки направления и скорости поиска нулевой точки по датчику (концевому выключателю), а также по метке C энкодера. В режиме импульсного управления положением предусмотрено задание смещения после обнаружения метки Таким образом, привод обеспечивает остановку вала двигателя всегда под одним и тем же углом после нахождения нулевой позиции.
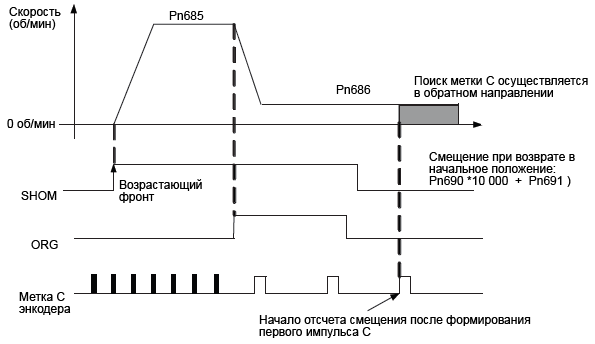
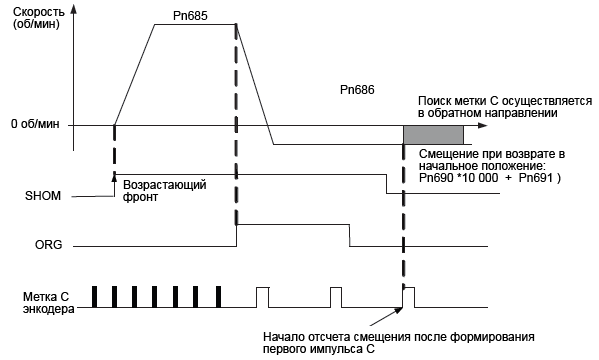
Для работы функции поиска начального положения задаются значения скоростей вращения при движении до поступления сигнала от датчика и после датчика – до метки C. При активации функции привод начинает непрерывное вращение до поступления сигнала на дискретный вход. При обнаружении возрастающего фронта сигнала датчика привод начинает поиск метки C в заданном направлении. После снятия сигнала датчика при обнаружении метки C энкодера сервопривод начинает отсчет заданного числа импульсов смещения, необходимых для возврата в начальное положение. После завершения смещения серводвигатель останавливается и выдается выходной сигнал завершения поиска начального положения.
Поиск метки C в обратном направлении

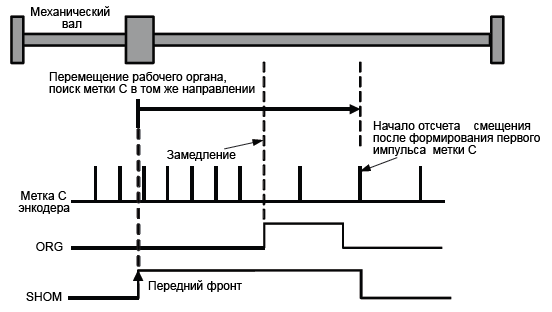
Поиск метки C в направлении, совпадающем с направлением движения до датчика