Технические статьи
Данные раздел содержит информационные статьи, созданные техническими специалистами компании ООО «Электропривод». Успешно работая на рынке с 2002 года, мы всегда уделяли приоритетное внимание всесторонней технической поддержке наших заказчиков. Наш технический отдел всегда готов провести подрбную техническую консультацию и ответить на все интересующие вас вопросы. Будем рады помочь вам разобраться во всех технических нюансах моделей сервоприводов и серводвигателей.
Сервоприводы в конструкции роботов
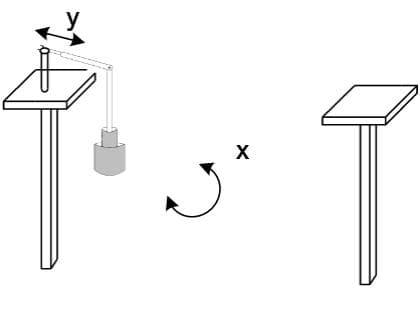
Как правило, у промышленных роботов несколько осей перемещения. Рассмотрим несколько примеров. В зависимости от того, для реализации какой задачи используется робот, у него могут быть разные требования к точности на разных осях. Точное перемещение по любой оси может обеспечить сервопривод.
При перемещении по осям Х и У удобно использовать режим задания положения внешними импульсами. Блок управления (сервоусилиткель) в сервоприводах SERVO-EP дает возможность обрабатывать дублирующие импульсы энкодера внешним контроллером и следить за перемещением. Если внешний источник импульсных сигналов генерирует их постоянно, двигатель можно остановить, используя функцию блокировки. Подав внешний сигнал, можно заблокировать обработку поступающих на сервоусилитель управляющих импульсов и остановить двигатель.
Так же можно использовать режим внутреннего задания положения, заранее указав сервоприводу необходимые величины перемещения или значения целевых координат, задав скорость на каждом отрезке перемещения, время разгона и торможения.
Заданными параметрами перемещения являются:
- Величина перемещения
- Скорость
- Время разгона
- Время торможения
-
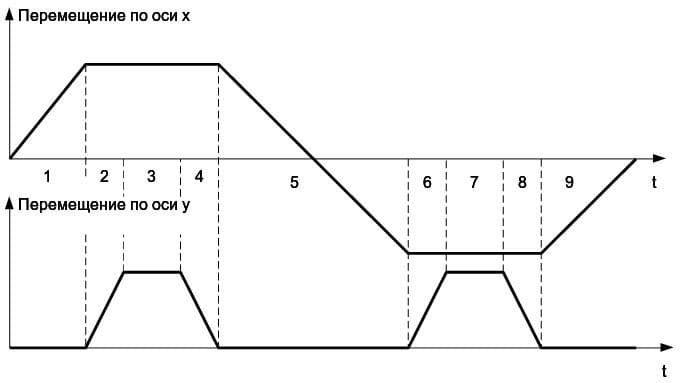
1 Ось х Серводвигатель 1 осуществляет перемещение с заданными параметрами Ось y Серводвигатель 2 остановлен -
2 Ось х Серводвигатель 1 остановлен Ось y Сервовигатель 2 совершает перемещение с заданными параметрами -
3 Ось х Серводвигатель 1 остановлен Ось y Серводвигатель 2 остановлен (работу совершает рука робота) -
4 Ось х Серводвигатель 1 остановлен Ось y Серводвигатель 2 совершает перемещение с заданными параметрами (возврат в исходную точку) -
5 Ось х Серводвигатель 1 совершает перемещение с заданными параметрами Ось y Серводвигатель 2 остановлен -
6 Ось х Серводвигатель 1 остановлен Ось y Серводвигатель 2 совершает перемещение с заданными параметрами -
7 Ось х Серводвигатель 1 остановлен Ось y Серводвигатель 2 остановлен (работу совершает рука робота) -
8 Ось х Серводвигатель 1 остановлен Ось y Серводвигатель 2 совершает перемещение с заданными параметрами (возврат в исходную точку) -
9 Ось х Серводвигатель 1 совершает перемещение с заданными параметрами Ось y Серводвигатель 2 остановлен
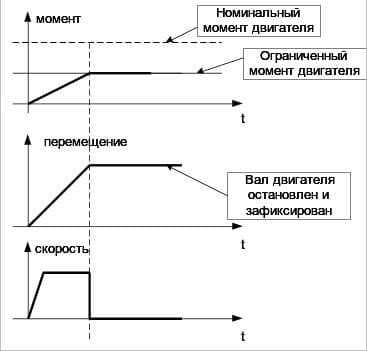
Рука робота также может требовать определенных условий и точности перемещения. Поэтому в конструкции руки робота также удобно использовать сервопривод. Например, рука робота совершает захват каких-либо хрупких деталей, которые требуют приложение определенного усилия. Если это усилие превышается, деталь может быть повреждена. В таких условиях удобно использовать аналоговое управление скоростью с функцией фиксации и применять ограничение момента, либо осуществлять аналоговое управление моментом с функцией ограничения скорости. Подобные режимы работы основаны на подаче аналогового сигнала для регулирования целевого параметра. Например, требуемая скорость перемещения регулируется аналоговым сигналом напряжения. Рука робота совершает работу с заданной скоростью, которая корректируется внешним регулятором. При захвате детали, по достижению установленного значения момента, блок управления сервоприводом выдаст сигнал индицирующий достижение целевого значения момента.
Используя данный сигнал можно активировать функцию фиксации: двигатель вала останавливается и переходит в режим удержания положения (если в результате внешнего воздействия вал смещается, привод возвращает его в исходную точку). Таким образом, сервопривод позволяет качественно осуществить захват: деталь надежно зафиксирована, но не повреждается, так как приложенное усилие ограничено. Другой вариант управления — задать величину максимально разрешенного момента. В этом случае сервоусилитель контролирует выходной момент двигателя и удерживает его в рамках заданного значения.