Электронная редукция
Предлагаемые сервоприводы имеют функцию электронной редукции. Электронная редукция используется для назначения коэффициента масштабирования, т.е. указания величины перемещения, соответствующей одному управляющему сигналу при импульсном управлении положением .
Отдельно назначаются числитель и знаменатель, поддерживается динамическое переключение между коэффициентами во время работы. Функция используется для управления посредством внешнего контроллера без пересчета количества импульсов энкодера. В современных версиях сервоприводов возможно использование как 16-битного, так и 32-битного редуктора. При использовании 32-битного электронного редуктора нет ограничений на диапазон вводимых значений. Электронный редуктор может использоваться как для более удобного расчета при управлении перемещением, так и для снижения числа управляющих импульсов в случае использования низкоскоростных управляющих контроллеров.
Основная задача электронного редуктора — установить соответствие количества входных управляющих импульсов внешнего контроллера любой величине хода детали. Минимальная единица задания положения, соответствующая одному управляющему импульсу внешнего контроллера, называется единицей перемещения.
Простой пример использования функции электронного редуктора для энкодера 2500 имп/об:
-
Электронный редуктор не используется
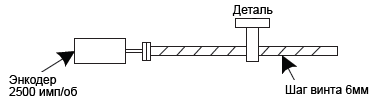
Для перемещения детали на 10 мм:
Таким образом, 10/6= 1,6666 оборота. 2500 x 4 импульсов равно 1 обороту, т.е. 1,6666 x 2500 x 4 = 16 666 импульсов
Для перемещения детали на 10 мм необходимо подать входной сигнал из 16 666 импульсов.
-
Электронный редуктор используется
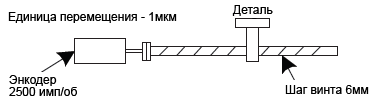
Для перемещения детали на 10 мм:
Единица перемещения равна 1 мкм. Таким образом, для перемещения детали на 10 мм (10000 мкм), 1 импульс = 1 мкм, 10000/1 = 10 000 импульсов.
Для перемещения детали на 10 мм необходимо подать входной сигнал из 10 000 импульсов.